Kolaboratívny manipulačný robot Szgh-Arm 2442co Kolaboratívny manipulačný robot na nakladanie a vykladanie



Kolaboratívny manipulačný robot Szgh-Arm 2442co Kolaboratívny manipulačný robot na nakladanie a vykladanie
Hlavná kategória
Priemyselné robotické rameno / Kolaboratívne robotické rameno / Elektrický chápadlo / Inteligentný aktuátor / Automatizačné riešenia
Aplikácia
Koboty SCIC Z-Arm sú ľahké 4-osové kolaboratívne roboty so zabudovaným hnacím motorom, ktoré už nevyžadujú reduktory ako iné tradičné roboty SCARA, čím sa náklady znižujú o 40 %. Koboty SCIC Z-Arm dokážu realizovať funkcie vrátane, ale nie výlučne, 3D tlače, manipulácie s materiálom, zvárania a laserového gravírovania. Sú schopné výrazne zlepšiť efektivitu a flexibilitu vašej práce a výroby.
Funkcie

Vysoká presnosť
Opakovateľnosť
±0,02 mm
Veľké užitočné zaťaženie
5 kg
Veľký rozpätie ramien
Os JI 220 mm
Os J2 200 mm
Konkurencieschopná cena
Kvalita na priemyselnej úrovni
Ckonkurencieschopná cena
Súvisiace produkty



Parameter špecifikácie
SCIC Z-Arm 2442B bol navrhnutý spoločnosťou SCIC Tech, je to ľahký kolaboratívny robot, ľahko sa programuje a používa, podporuje SDK. Okrem toho podporuje detekciu kolízií, konkrétne sa automaticky zastaví pri dotyku s človekom, čo predstavuje inteligentnú spoluprácu človek-stroj s vysokou úrovňou bezpečnosti.
| Kolaboratívne robotické rameno Z-Arm 2442B | Parametre |
| Dĺžka ramena 1 osi | 220 mm |
| Uhol natočenia 1 osi | ±90° |
| Dĺžka ramena v 2 osiach | 200 mm |
| Uhol otáčania v 2 osiach | ±164° (voliteľné: 15 – 345 stupňov) |
| Zdvih osi Z | 240 (Výška sa dá prispôsobiť) |
| Rozsah otáčania osi R | ±1080° |
| Lineárna rýchlosť | 1600 mm/s (užitočné zaťaženie 4 kg) |
| Opakovateľnosť | ±0,02 mm |
| Štandardné užitočné zaťaženie | 4 kg |
| Maximálne užitočné zaťaženie | 5 kg |
| Stupeň voľnosti | 4 |
| Napájací zdroj | 220V/110V50-60HZ prispôsobené na 48VDC špičkový výkon 200W |
| Komunikácia | Ethernet |
| Rozšíriteľnosť | Vstavaný integrovaný ovládač pohybu poskytuje 24 I/O + rozšírenie pod pazuchou |
| Výšku osi Z je možné prispôsobiť | 0,1 m – 0,5 m |
| Učenie ťahania osi Z | / |
| Elektrické rozhranie vyhradené | Štandardná konfigurácia: 24*23awg (netienené) vodiče z panela so zásuvkami cez kryt spodného ramena Voliteľné: 2 vákuové trubice φ4 cez panel so zásuvkami a prírubu |
| Kompatibilné elektrické chápadlá HITBOT | E-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Dýchajúce svetlo | / |
| Rozsah pohybu druhej ruky | Štandard: ±164° Voliteľné: 15 – 345 stupňov |
| Voliteľné príslušenstvo | / |
| Použite prostredie | Teplota okolia: 0 – 45 °C Vlhkosť: 20 – 80 % relatívnej vlhkosti (85 % relatívnej vlhkosti) (bez námrazy) |
| Digitálny vstup I/O portu (izolovaný) | 9+3+predĺženie predlaktia (voliteľné) |
| Digitálny výstup I/O portu (izolovaný) | 9+3+predĺženie predlaktia (voliteľné) |
| Analógový vstup I/O portu (4 – 20 mA) | / |
| Analógový výstup I/O portu (4 – 20 mA) | / |
| Výška robotického ramena | 683 mm |
| Hmotnosť robotického ramena | Zdvih 240 mm, čistá hmotnosť 27 kg |
| Základná veľkosť | 250 mm * 250 mm * 15 mm |
| Vzdialenosť medzi otvormi na upevnenie základne | 200 mm * 200 mm so štyrmi skrutkami M8 * 20 |
| Detekcia kolízie | √ |
| Výučba dragsterov | √ |
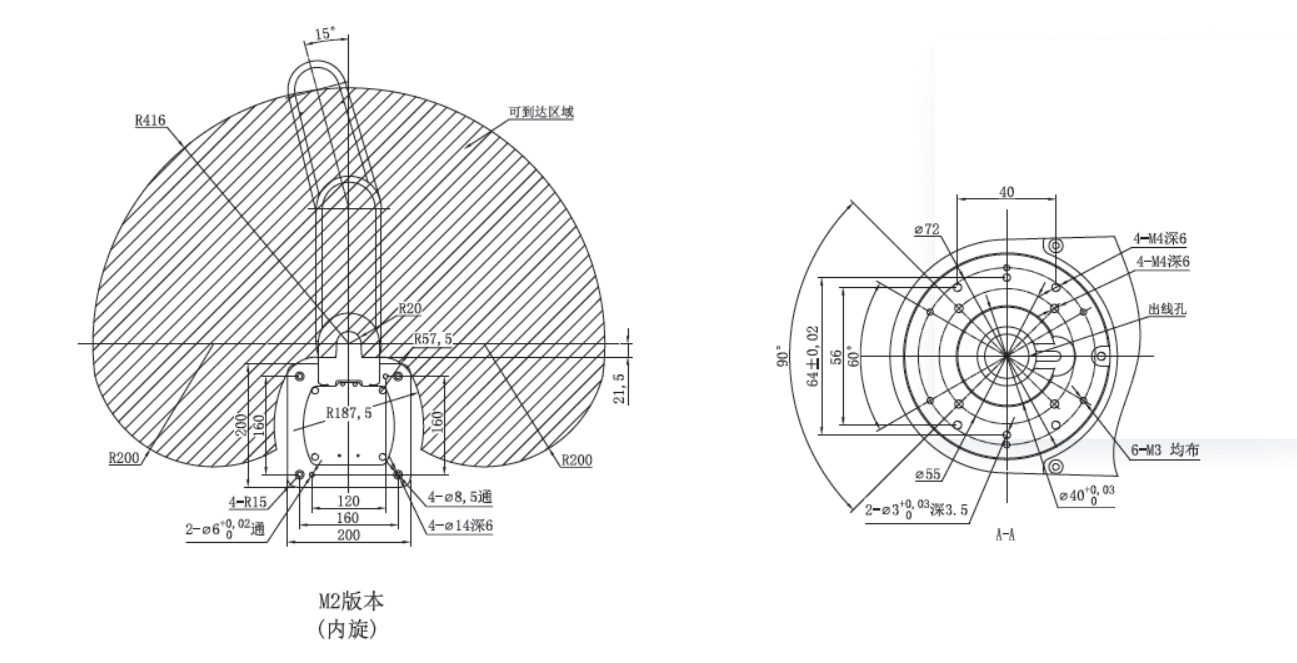
Rozsah pohybu Verzia M1 (otáčanie smerom von)
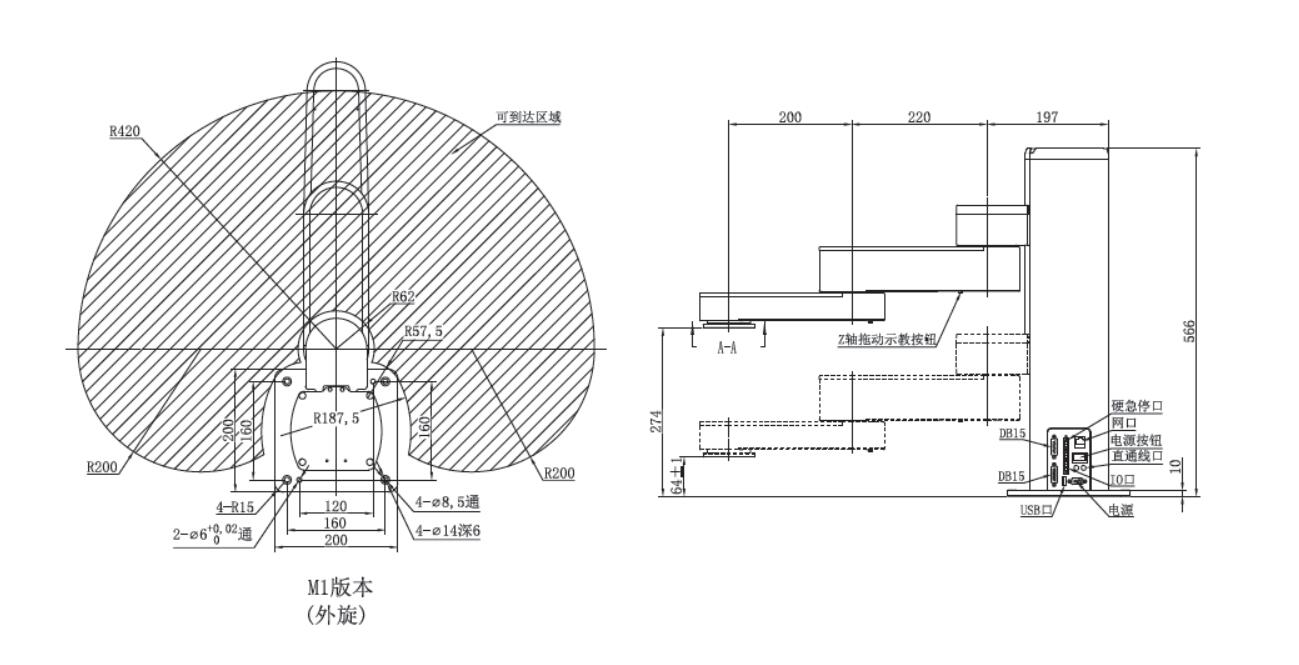
Úvod do rozhrania

Rozhranie robotického ramena Z-Arm 2442 je nainštalované na 2 miestach, na boku základne robotického ramena (definované ako A) a na zadnej strane koncového ramena. Panel rozhrania v bode A má rozhranie vypínača (JI), rozhranie 24V napájania DB2 (J2), výstup do používateľského I/O portu DB15 (J3), používateľský vstupný/výstupný port DB15 (J4) a tlačidlá konfigurácie IP adresy (K5). Ethernetový port (J6), systémový vstupný/výstupný port (J7) a dve 4-žilové priame zásuvky J8A a J9A.
Prevencia
1. Zotrvačnosť užitočného zaťaženia
Ťažisko užitočného zaťaženia a odporúčaný rozsah užitočného zaťaženia s zotrvačnosťou pohybu osi Z sú znázornené na obrázku 1.

Obrázok 1 Popis užitočného materiálu série XX32
2. Zrážková sila
Spúšťacia sila ochrany proti kolízii horizontálneho kĺbu: sila série XX42 je 40 N.
3. Vonkajšia sila v osi Z
Vonkajšia sila osi Z nesmie presiahnuť 120 N.

Obrázok 2
4. Poznámky k inštalácii prispôsobenej osi Z, podrobnosti nájdete na obrázku 3.

Obrázok 3
Upozornenie:
(1) Pri prispôsobenej osi Z s veľkým zdvihom sa tuhosť osi Z znižuje so zvyšujúcim sa zdvihom. Keď zdvih osi Z prekročí odporúčanú hodnotu, používateľ má požiadavku na tuhosť a rýchlosť je > 50 % maximálnej rýchlosti, dôrazne sa odporúča nainštalovať za os Z podperu, aby sa zabezpečilo, že tuhosť ramena robota spĺňa požiadavky pri vysokej rýchlosti.
Odporúčané hodnoty sú nasledovné: Zdvih osi Z série Z-ArmXX42 > 600 mm
(2) Po zväčšení zdvihu osi Z sa výrazne zníži vertikalita osi Z a základne. Ak nie sú prísne požiadavky na vertikalitu osi Z a referenčnej základne platné, obráťte sa na technický personál samostatne.
5. Zapojenie napájacieho kábla za chodu je zakázané. Výstraha pri odpojení kladného a záporného pólu napájacieho zdroja.
6. Nestláčajte horizontálne rameno, keď je napájanie vypnuté.

Obrázok 4
Odporúčanie pre konektor DB15

Obrázok 5
Odporúčaný model: Pozlátený samec s ABS krytom YL-SCD-15M Pozlátená samica s ABS krytom YL-SCD-15F
Popis veľkosti: 55 mm * 43 mm * 16 mm
(Pozri obrázok 5)
Tabuľka chápadiel kompatibilných s robotickým ramenom
| Číslo modelu robotického ramena. | Kompatibilné chápadlá |
| XX42 T1 | Z-EFG-8S NK/Z-EFG-12 NK/Z-EFG-20 NM NMA/Z-EFG-20S/ Z-EFG-30NM NMA 3D tlač s 5. osou |
| XX42 T2 | Z-EFG-50 ALL/Z-EFG-100 TXA |
Diagram rozmerov inštalácie napájacieho adaptéra
Konfigurácia XX42 Napájací zdroj 24 V 500 W RSP-500-SPEC-CN

Schéma prostredia vonkajšieho použitia robotického ramena

Naše podnikanie


Kategórie produktov
-

Ekonomické 6-osové robotické rameno s Megmeet Ehave...
-

6-osový viacstranový manipulačný chápadlo Scara Rob...
-
Najlepšia cena 6-osového robotického ramena, zváracieho stroja...
-

Inteligentné 6-osé CNC robotické rameno / mechanické rameno...
-

Automatické robotické zváracie zariadenie Zváračský priemysel...
-
Horúci výpredaj robotického ramena kovového 6-osového mechanického robota...