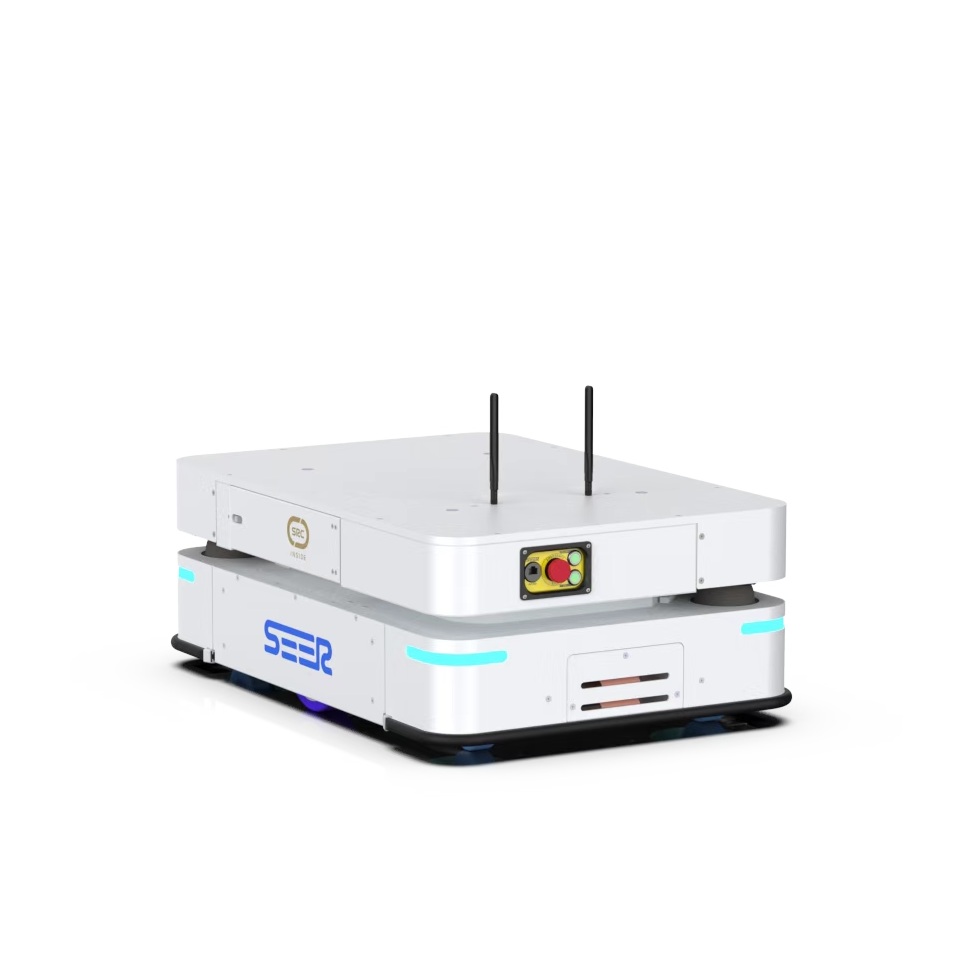
ŠTANDARDNÉ AMRS – Auto mobilné základne AMB-300XS

Hlavná kategória
AGV AMR / zdvíhanie pomocou zdvíhacieho zariadenia AGV AMR / automaticky riadené vozidlo AGV / autonómny mobilný robot AMR / vozidlo AGV AMR na priemyselnú manipuláciu s materiálom / čínsky výrobca robot AGV / skladový AMR / zdvíhanie pomocou zdvíhacieho zariadenia AMR s laserovou navigáciou SLAM / mobilný robot AGV AMR / podvozok s laserovou navigáciou SLAM / inteligentný logistický robot
Aplikácia

Bezpilotný podvozok série AMB AMB (Auto Mobile Base) pre autonómne vozidlá AGV, univerzálny podvozok určený pre autonómne riadené vozidlá AGV, poskytuje niektoré funkcie, ako je úprava máp a lokalizačná navigácia. Tento bezpilotný podvozok pre vozík AGV poskytuje rozsiahle rozhrania, ako sú I/O a CAN, na montáž rôznych horných modulov spolu s výkonným klientskym softvérom a dispečerskými systémami, ktoré pomáhajú používateľom rýchlo dokončiť výrobu a aplikáciu autonómnych vozidiel AGV. Na vrchu bezpilotného podvozku série AMB pre autonómne riadené vozidlá AGV sú štyri montážne otvory, ktoré podporujú ľubovoľné rozšírenie pomocou zdvíhacích zariadení, valčekov, manipulátorov, latentnej trakcie, displeja atď., aby sa dosiahlo viacero aplikácií jedného podvozku. Spoločnosť AMB spolu so spoločnosťou SEER Enterprise Enhanced Digitalization dokáže realizovať jednotné dispečing a nasadenie stoviek produktov AMB súčasne, čo výrazne zlepšuje inteligentnú úroveň vnútornej logistiky a dopravy v továrni.
Funkcia

· Menovité zaťaženie: 300 kg
· Doba trvania: 12 hodín
· Číslo lidaru: 2
· Priemer otáčania: 972,6 mm
· Rýchlosť navigácie: ≤1,5 m/s
· Presnosť polohovania: ±5,0,5 mm
● Certifikácia bezpečnosti CE, vynikajúci výkon a vynikajúci bezpečnostný štandard už od návrhu
Certifikácia CE (ISO 3691-4:2020) poskytuje najvyššiu úroveň zabezpečenia kvality a bezpečnosti, čo podporuje export.
I/O, CAN, RS485 a ďalšie rozhrania sú vyhradené pre rozšírenie mechanizmu vyššej úrovne, ktorý dokáže realizovať rôzne robotické aplikácie.
● Presné polohovanie ±5 mm
Presnosť navigačnej polohy ±5 mm a rýchlosť navigácie 1,5 m/s pomáhajú podnikom pracovať efektívne.
● Celkové funkcie a bezproblémové rozšírenie
Medzi základné funkcie patrí úprava máp, úprava modelu, určovanie polohy a navigácia, základný model pohybu (diferenciál), periférne rozšírenia (valčeky, zdvíhanie, latentná trakcia), rozhrania atď.
● Čistota triedy 4, väčšia spoľahlivosť
Prešiel testom čistoty ISO CLASS4, možno ho priamo použiť v odvetviach s vysokými nárokmi na čistotu, ako sú polovodiče.
● 3D detekcia prekážok, bezpečnejšie
Pre ďalšie zvýšenie bezpečnosti produktu je podporovaná 3D detekcia prekážok a navigácia pomocou reflektorov.



Parameter špecifikácie
| Model produktu | AMB-150 / AMB-150-D | AMB-300 / AMB-300-D | AMB-300XS | |
| Základné parametre | Navigačná metóda | Laserový SLAM | Laserový SLAM | Laserový SLAM |
| Režim jazdy | Dvojkolesový diferenciál | Dvojkolesový diferenciál | Dvojkolesový diferenciál | |
| Farba škrupiny | Perleťovo biela / Perleťovo čierna | Perleťovo biela / Perleťovo čierna | RAL9003 | |
| D*Š*V (mm) | 800*560*200 | 1000*700*200 | 842*582*300 | |
| Priemer otáčania (mm) | 840 | 1040 | 972,6 | |
| Hmotnosť (s batériou) (kg) | 66 | 144 | 120 | |
| Nosnosť (kg) | 150 | 300 | 300 | |
| Minimálna priechodná šírka (mm) | 700 | 840 | 722 | |
| Výkonnostné parametre | ||||
| Presnosť navigačnej polohy (mm*) | ±5 | ±5 | ±5 | |
| Presnosť uhla navigácie(°) | ±0,5 | ±0,5 | ±0,5 | |
| Rýchlosť navigácie (m/s) | ≤1,4 | ≤1,4 | ≤1,5 | |
| Parametre batérie | Špecifikácie batérie (V/Ah) | 48/35 (Ternárny lítium) | 48/52 (Ternárny lítium) | 48/40 (Ternárny lítium) |
| Komplexná výdrž batérie (h) | 12 | 12 | 12 | |
| Čas nabíjania (10 – 80 %) (10 – 80 %) (h) | ≤2 | ≤ 2,5 | ≤ 2,5 | |
| Spôsob nabíjania | Manuálny/Automatický/Prepínač | Manuálny/Automatický/Prepínač | Manuálny/Automatický/Prepínač | |
| Rozšírené rozhrania | Výkon DO | Sedemcestný (celková zaťažiteľnosť 24 V/2 A) | Sedemcestný (celková zaťažiteľnosť 24 V/2 A) | Trojcestný (celková zaťažiteľnosť 24 V/2 A) |
| DI | Desaťcestný (NPN) | Desaťcestný (NPN) | Jedenásťcestný (PNP/NPN) | |
| Rozhranie núdzového zastavenia | Obojsmerný výstup | Obojsmerný výstup | Obojsmerný výstup | |
| Káblová sieť | Trojcestný gigabitový ethernet RJ45 | Trojcestný gigabitový ethernet RJ45 | Obojsmerný gigabitový ethernet M12 X-Code | |
| Konfigurácie | Číslo lidaru | 1 alebo 2 | 1 alebo 2 | 2 (SICK nanoScan3) |
| Displej HMI | ● | ● | - | |
| Tlačidlo núdzového zastavenia | ● | ● | ● | |
| Bzučiak | ● | ● | - | |
| Rečník | ● | ● | ● | |
| Okolité svetlo | ● | ● | ● | |
| Nárazníkový pás | - | - | ● | |
| Funkcie | Wi-Fi roaming | ● | ● | ● |
| Automatické nabíjanie | ● | ● | ● | |
| Rozpoznanie police | ● | ● | ● | |
| Navigácia laserovým reflektorom | 〇 | 〇 | 〇 | |
| 3D vyhýbanie sa prekážkam | 〇 | 〇 | 〇 | |
| Certifikácie | ISO 3691-4 | - | - | ● |
| EMC/ESD | ● | ● | ● | |
| UN38.3 | ● | ● | ● | |
| Čistota | - | Trieda ISO 4 | Trieda ISO 4 | |
* Presnosť navigácie sa zvyčajne vzťahuje na presnosť opakovateľnosti, s akou robot naviguje na stanicu.
● Štandardné 〇 Voliteľné Žiadne
Naše podnikanie


Kategórie produktov
-

INTELIGENTNÝ VYSOKOZDVIŽNÝ VOZÍK – SFL-CBD15 Laser SLAM Sma...
-

ŠTANDARDNÉ AMRS – Auto mobilné základne AMB-150...
-

Režim AMR/AGV – Automatický systém novej generácie...
-

ZDVIHÁVACIE ROBOTY – Zdvíhací robot Laser SLAM...
-

ZDVIHÁVACIE ROBOTY – Všesmerové zdvíhanie...
-

INTELIGENTNÝ VYSOKOZDVIŽNÝ VOZÍK – SFL-CPD15-T Laser SLAM C...